Volflex++ is a shape-changing haptic interface that can generate the physical characteristics, such as shape and rigidity, of virtual objects using an array of newly developed non-expandable balloons. To alter the rigidity of each non-expandable balloon, the volume of air in it is controlled through a linear actuator and a pressure sensor based on Hooke’s law. Furthermore, to change the volume of each balloon, its exposed surface area is controlled by using another linear actuator with a trumpet-shaped tube. A position control mechanism is constructed to display virtual objects using the balloons. The 3D position of each balloon is controlled using a flexible tube and a string.
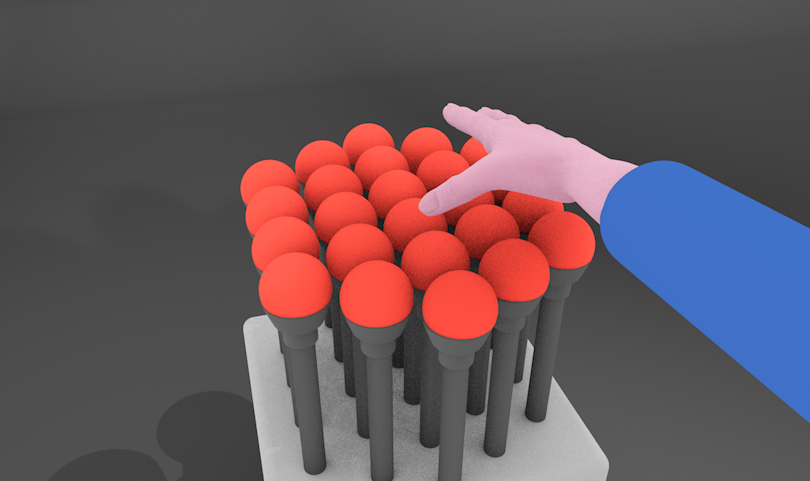
Voflex++ aims to show that soft robotic structures with controllable materiality and shape-change can be combined with Virtual Reality to create new physical-virtual objects.
Overview of the system
Volflex++ is composed of two main mechanisms: one for controlling the rigidity, and another for controlling the size.
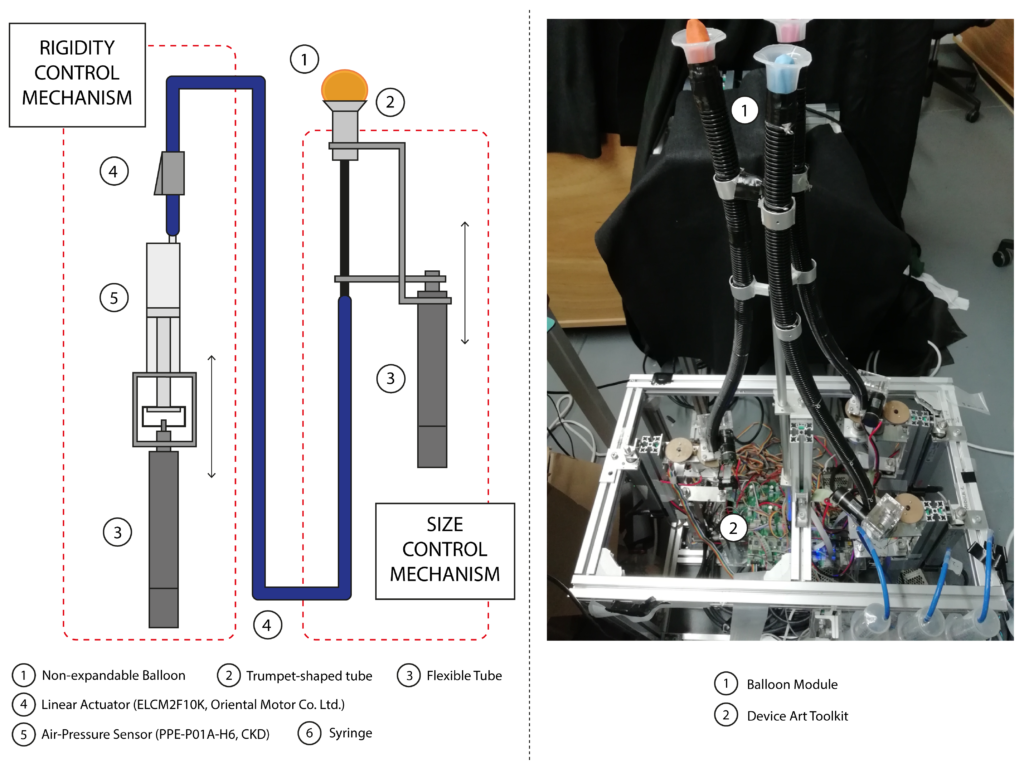
Rigidity and Volume can be controlled separately thanks to a newly developed non-expandable balloon.
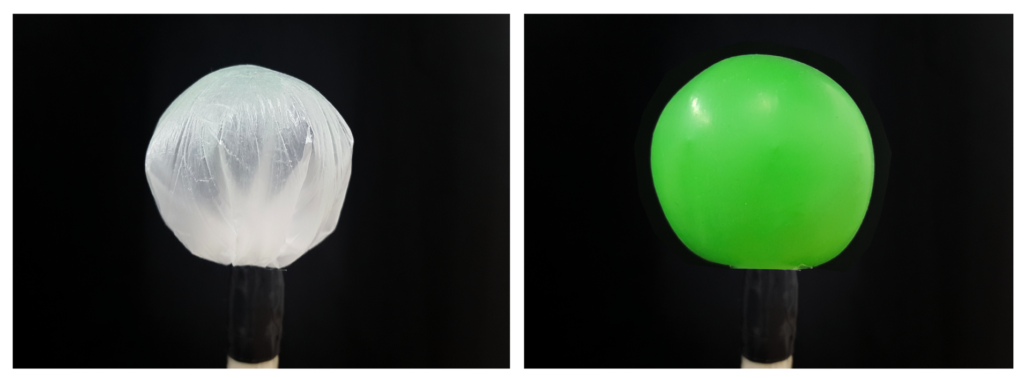
Non-expandable balloon. On the left, the air-bag. On the right, the cover made of a latex balloon.
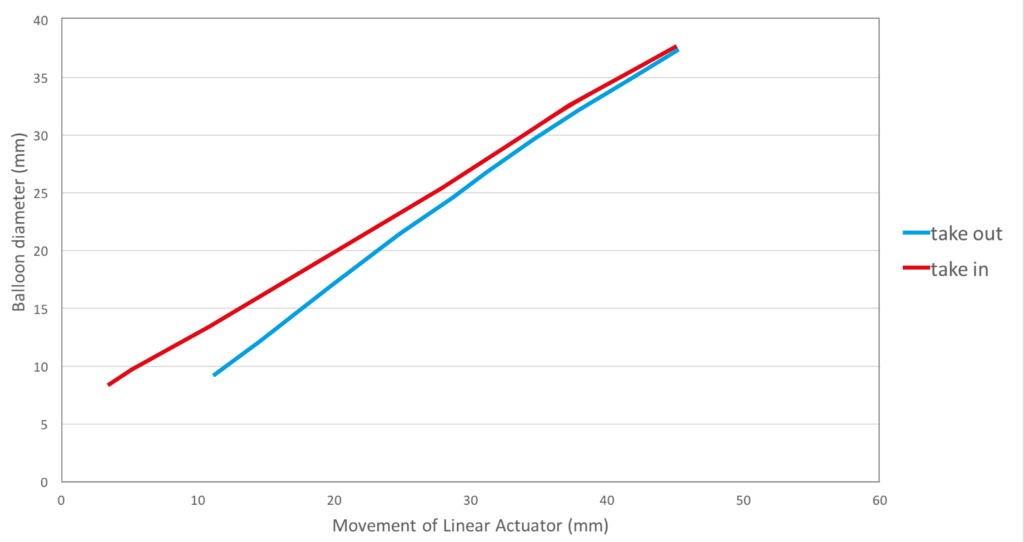
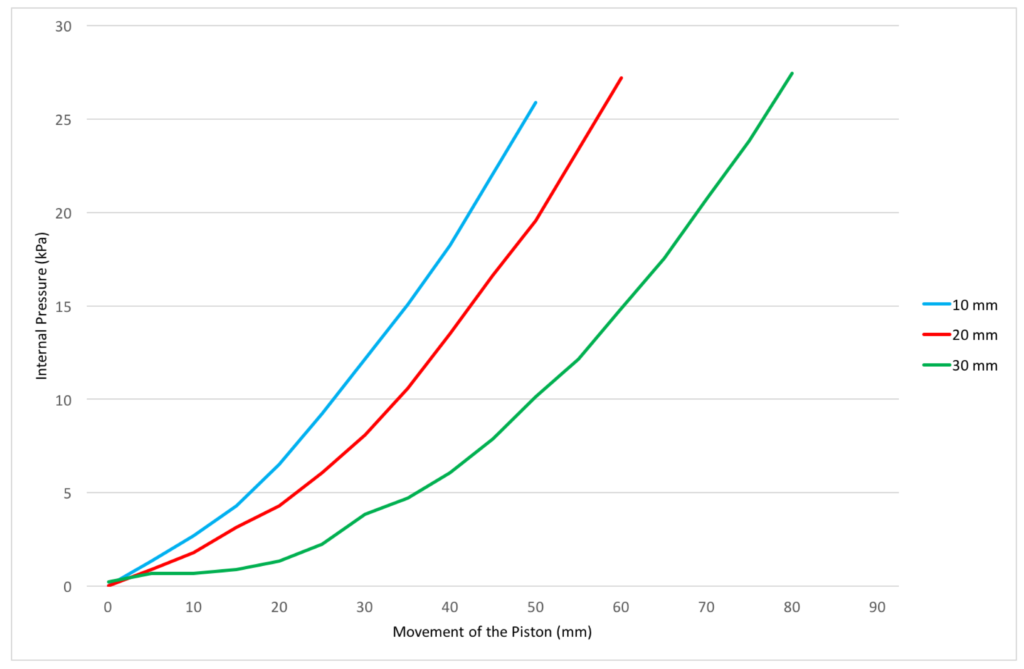
Change of Volume
Each balloon can dynamically change its volume, from null to large (c.a. 40 mm)
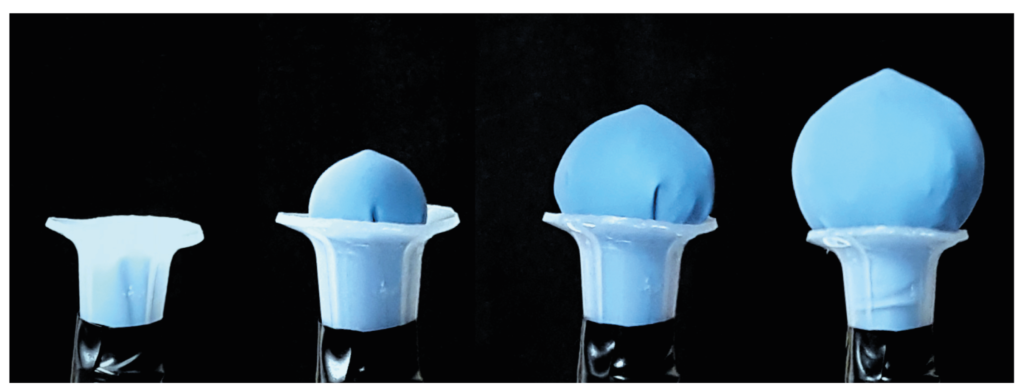
Four types of volume change: from null (left) to large (right).
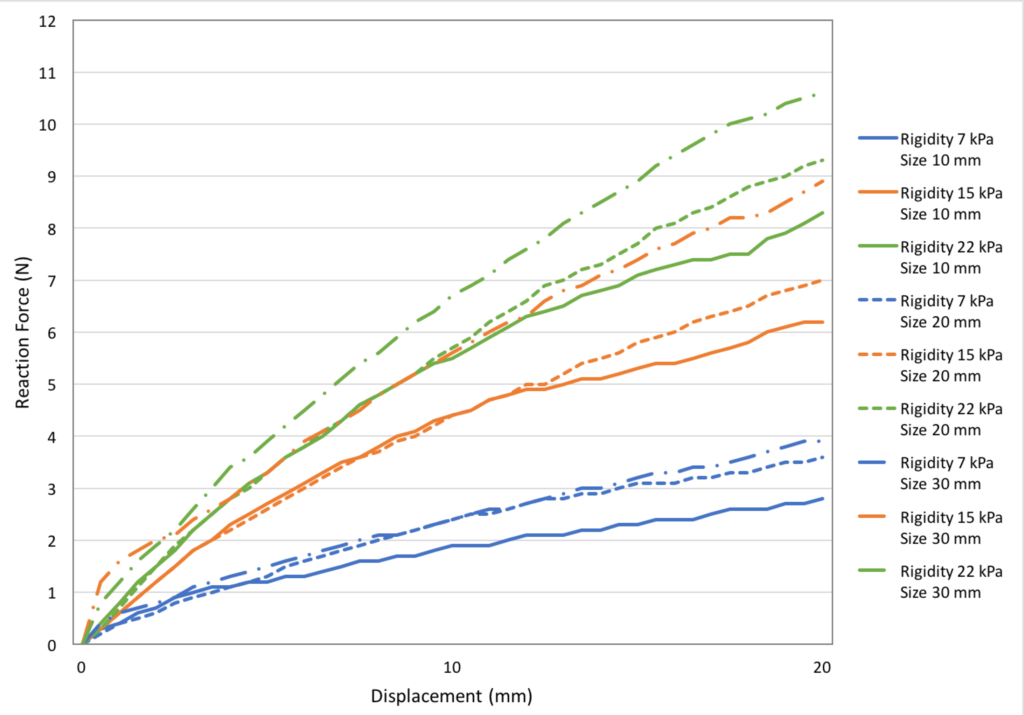
Change of Rigidity
Each balloon can change its rigidity, from very soft one (corresponding to an internal pressure of 5-10 kPa) to a very stiff one (c.a. 35 kPa).
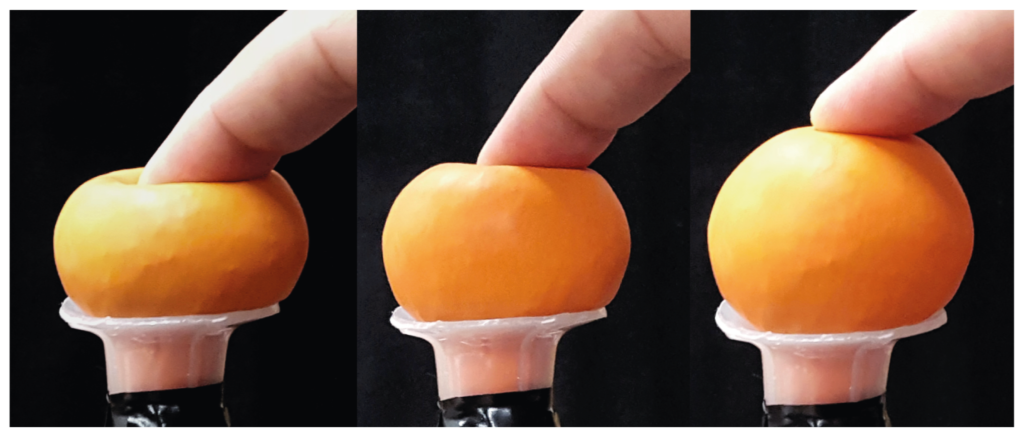
Three types of volume changes: soft (left), medium (center), stiff (right).
Change of Position
Besides the change of volume and rigidity, the position in space of each balloon can be modified in real-time. In this way, different three-dimensional shapes can be presented.
(under development)
Creation of Virtual-Physical Objects
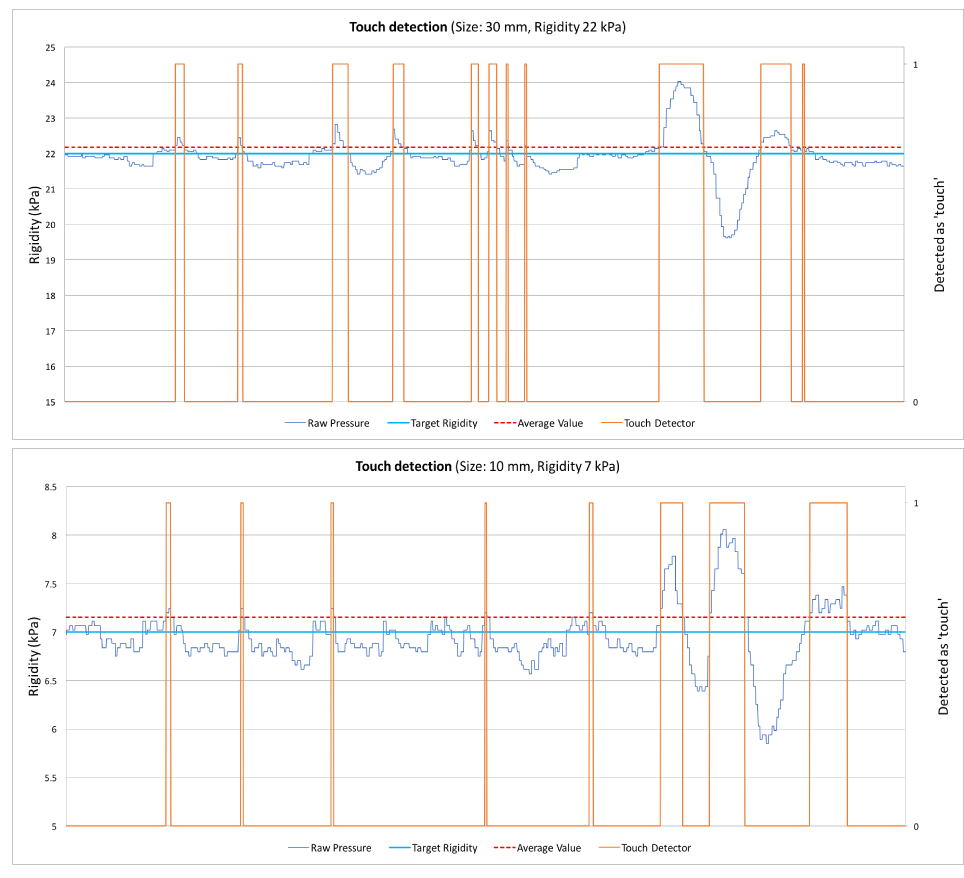
Touch Detection
Dynamic Touch Detector
We developed a dynamic touch detector based on the air pressure sensor. Every time a new target size and/or rigidity is selected, the internal pressure of the balloon is averaged and become a new threshold (in the figure, the blue line represents the new target rigidity, while the dashed red line represents the averaged value). When a user presses the surface, and the threshold is surpassed a touch is detected. Such an approach can be implemented in the current system without the use of any other sensors.
Capacitive Sensing
We are developing a novel touch detector using capacitive sensing. Capacitive sensing proved effective for such kind of situation when you have a surface that changes not its rigidity but also its size. Touch detection performed well across several rigidities and sizes.
Publications
Alberto Boem, Yuuki Enzaki, Hiroaki Yano, Hiroo Iwata. 2019. Human Perception of a Haptic Shape-changing Interface with Variable Rigidity and Size. In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces, Osaka (JP), 2019. DOI:10.1109/VR.2019.8798214 . [pdf]
Alberto Boem, Hiroo Iwata. 2018. Encounter-type Haptics for Virtual Reality Musical Instruments. In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces, Reutlingen (DE), 2018. DOI:10.1109/VR.2018.8446549 [pdf]
Volflex is a haptic technology envisioned by Prof. Hiroo Iwata and developed at the Virtual Reality Lab of the University of Tsukuba (JP). This new version was first developed by Naoki Takizawa.