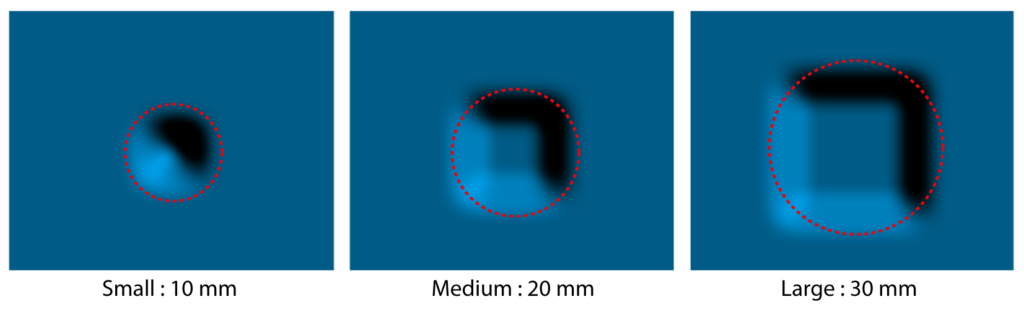
A proof-of-concept application. A virtual flat surface, with dynamic size and rigidity, can be presented physically through Volflex++.
To expand the possibilities, we developed a physical sound model of a membrane. Depending on the settings of the surface (size and rigidity) the sound model will change accordingly. This proposed approach can lead to a new type of shape-changing haptic interfaces, that couple physical and virtual objects not only visually but also sonically.
To enable the interaction, we developed an embedded touch detector using the air-pressure sensor attached to each balloon.
A sound model based on the physical characteristics of an elastic surface has been developed. The sound model (presented below) must dynamically adapt to the different characteristics (rigidity and size) of the object presented through the Volflex++ interface.
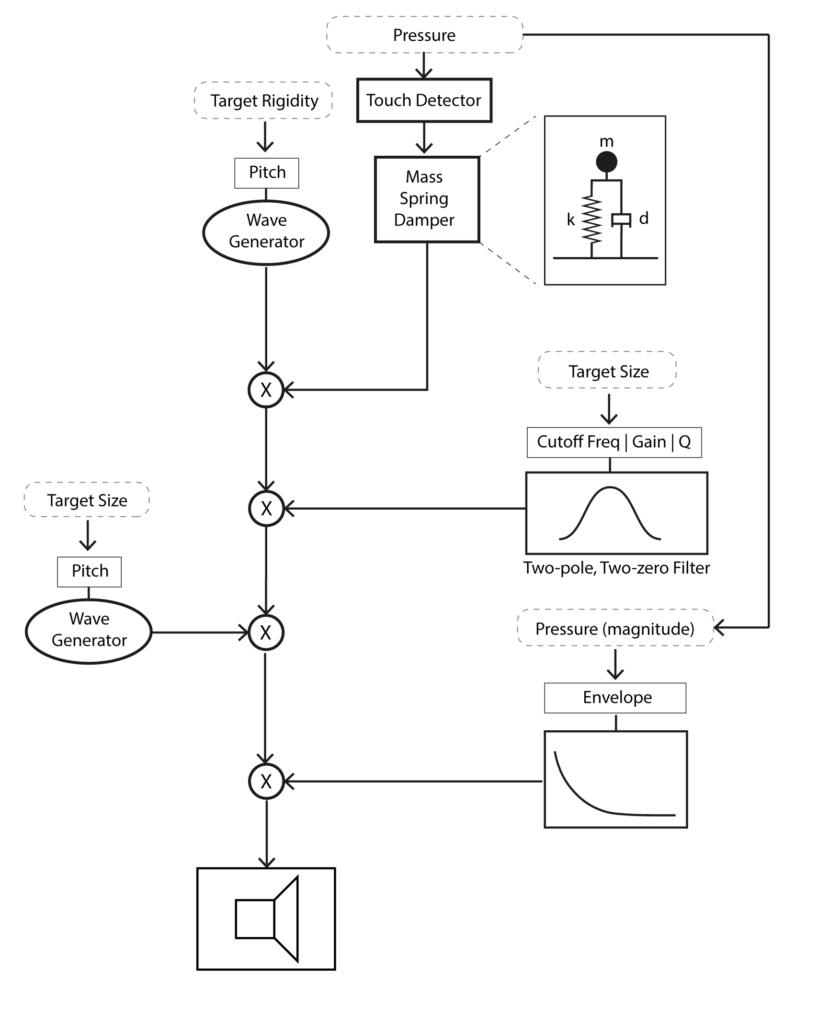

MIDI Mappings
Publications
Alberto Boem, Yuuki Enzaki, Hiroaki Yano, Hiroo Iwata. 2019. Human Perception of a Haptic Shape-changing Interface with Variable Rigidity and Size. In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces, Osaka (JP), 2019. DOI:10.1109/VR.2019.8798214 . [pdf]
Alberto Boem, Hiroo Iwata. 2018. Encounter-type Haptics for Virtual Reality Musical Instruments. In Proceedings of the IEEE Conference on Virtual Reality and 3D User Interfaces, Reutlingen (DE), 2018. DOI:10.1109/VR.2018.8446549 [pdf]
Volflex is a haptic technology envisioned by Prof. Hiroo Iwata and developed at the Virtual Reality Lab of the University of Tsukuba (JP). This new version was first developed by Naoki Takizawa.